Design and demonstration of human climbing grippers. (a) The CAD model
By A Mystery Man Writer

A self-adaptive high precision gripper for shape variant components: Towards higher reliability and efficiency of a cobotic cell - ScienceDirect

Mechanical performance characterization and analysis of the PSCU. (a)

Development of Perching and Fail-Safe Module for Wall Climbing Multi-copter
Schematic diagrams of the wall-climbing robot. (a) CAD model of the

Design and development of adjustable stair climbing robot

A Review of Line Suspended Inspection Robots for Power Transmission Lines
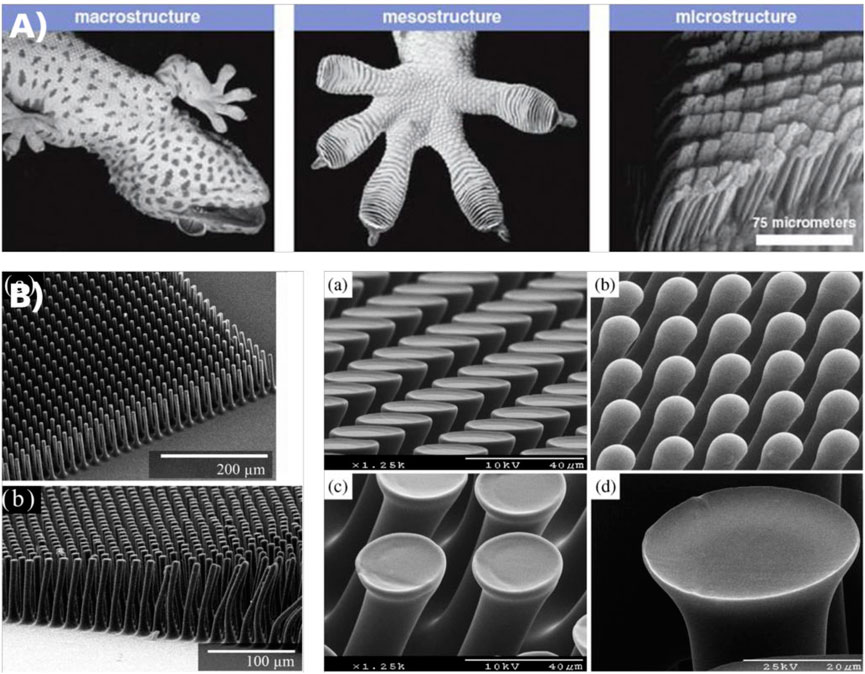
Frontiers Biomimetics for innovative and future-oriented space applications - A review

A SEM image and b XRD pattern of vertically aligned ZnO nanowire array

Robotics, Free Full-Text

DESIGN WORLD ROBOTICS HANDBOOK 2019 by WTWH Media LLC - Issuu

Xiaosong Li's research works Tsinghua University, Beijing (TH) and other places

Development of Perching and Fail-Safe Module for Wall Climbing Multi-copter
Sensors, Free Full-Text

CAD model of gripper: (a) three fingers each with two degrees of

Yuanzhe LI, PhD, Tsinghua University, Beijing, TH, Department of Mechanical Engineering
- Koze Kick Back Terry Lined No-Slip Gripper Socks for Kids, Baby, & Toddlers - Unisex

- Bombas Toddler Mickey And Friends Sensational Gripper Calf Sock 6-Pack NWT inpkg

- Gripper Hinged Knee Braces

- Tat2X Ink Armor Premium Calf Tattoo Cover Up Sleeve - No Slip Gripper - U.S. Made - Light - XSS (single calf leg tattoo cover up sleeve) : : Beauty & Personal Care

- Kids Gripper Socks – Bombas

- Strength Shop 10mm Lever Belt - IPF Approved - Black - Powerlifting – Strength Shop USA

- Threads just graduated from the iPhone to the desktop - 9to5Mac
- VICTORIA'S SECRET PINK 5-PACK NO-SHOW Cheeky UNDERWEAR Bandana S,M

- Tawop Girls Training Bras 10-12 Years Old Women'S Rimless Stretch

- 6Pcs Box Braiding Crochet Hair 22inch Long Box Braids Hair Synthetic Kanekalon 3X Afro Box Braiding Hair Extensions for Black Women Girls(#1B) : Beauty & Personal Care
