How to store multiple poses? - General Application Help: How do I? - Universal Robots Forum

By A Mystery Man Writer
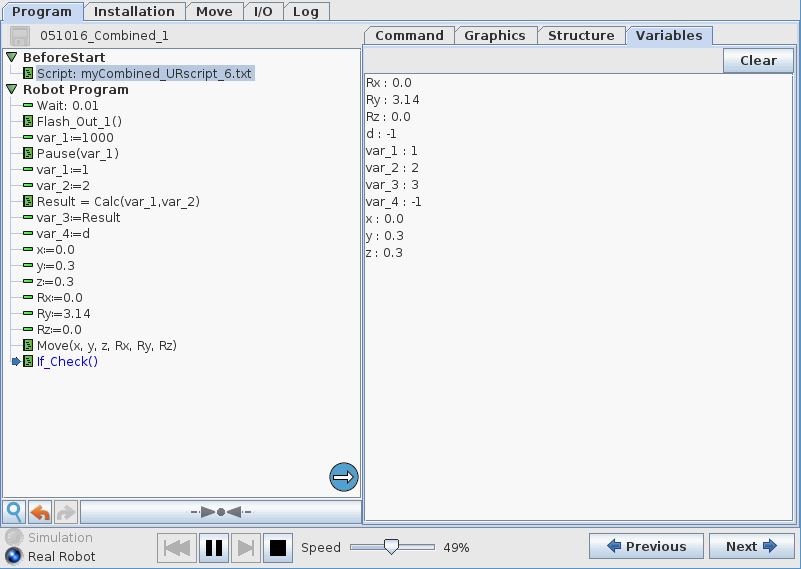
Hi, I need to store multiple positions/poses of the robot to access them later in the program. The number of positions depends on the user input - the query works perfectly. I thought I could just make a loop and fill each pose into an array but it does not work. I know how to store a pose in a single variable but in my application the user decides how many poses he needs to store. Can anyone shed some light here? Thanks and best regards Stephan PS: oh and where can I change my username to

media.springer/full/springer-static/imag
Robotics, Free Full-Text

An Agenda for Action: Alternative Processes for Negotiating a Killer Robots Treaty
Robotics, Free Full-Text
Frontiers Terrain-aware semantic mapping for cooperative subterranean exploration

The Impact of Advanced Robotics on Industrial Workforce Dynamics

How to Train Autonomous Mobile Robots to Detect Warehouse Pallet Jacks Using Synthetic Data

Amazing takeaway from #A3Forum2024! Robotics creates jobs in manufacturing!, Jake Hall posted on the topic

Move with Offset - Product Wishlist - Universal Robots Forum
UR Programming Functions: – UR Forum-Help-Q&A
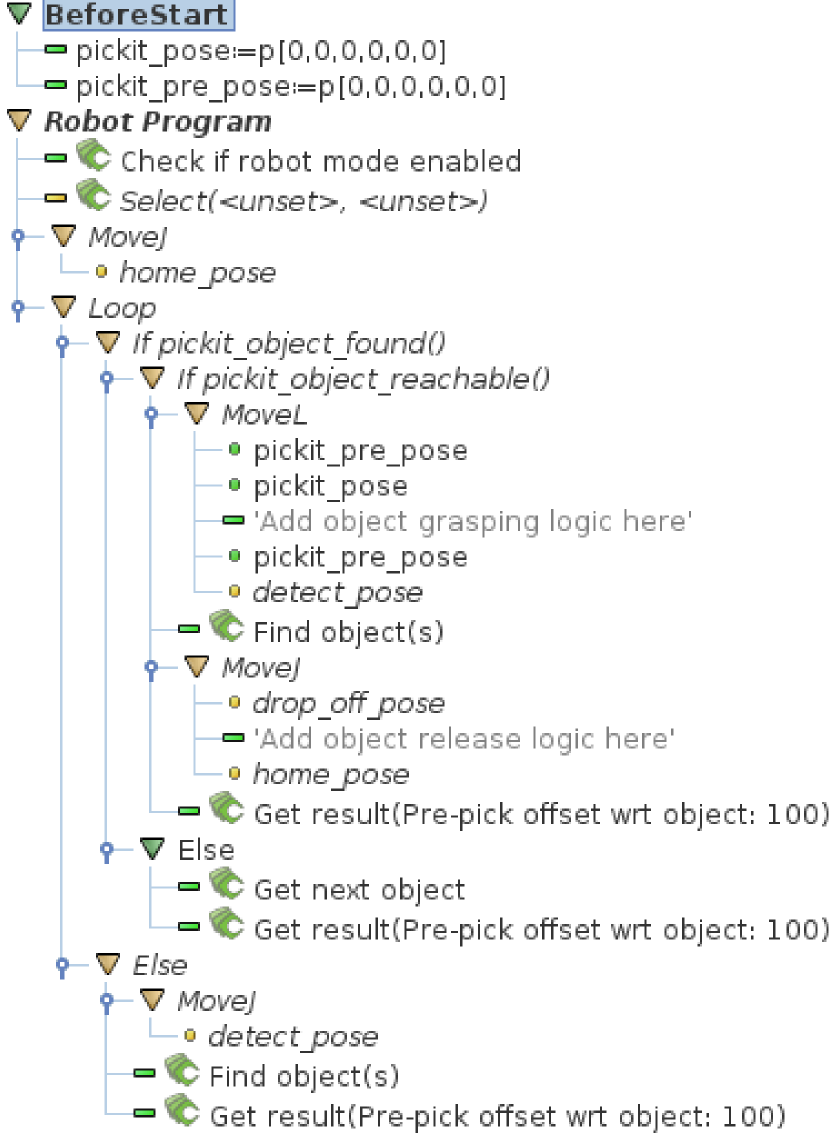
Universal Robots URCap example picking program — Pickit 1.10 documentation
- Cacique Panela Part Skim Milk Cheese (16 oz., 2 pk.)
- Rosalind Wheeler Gathering Harvest 2 Piece Metal Bucket Set

- Slim Fit Shiny Sharkskin Men's 2 Piece Suit in Red

- Skip Hop Cozy-Up 2-in-1 Bedside Sleeper Grey and White Clouds 100% Cotton Fitted Bassinet Sheet : Baby

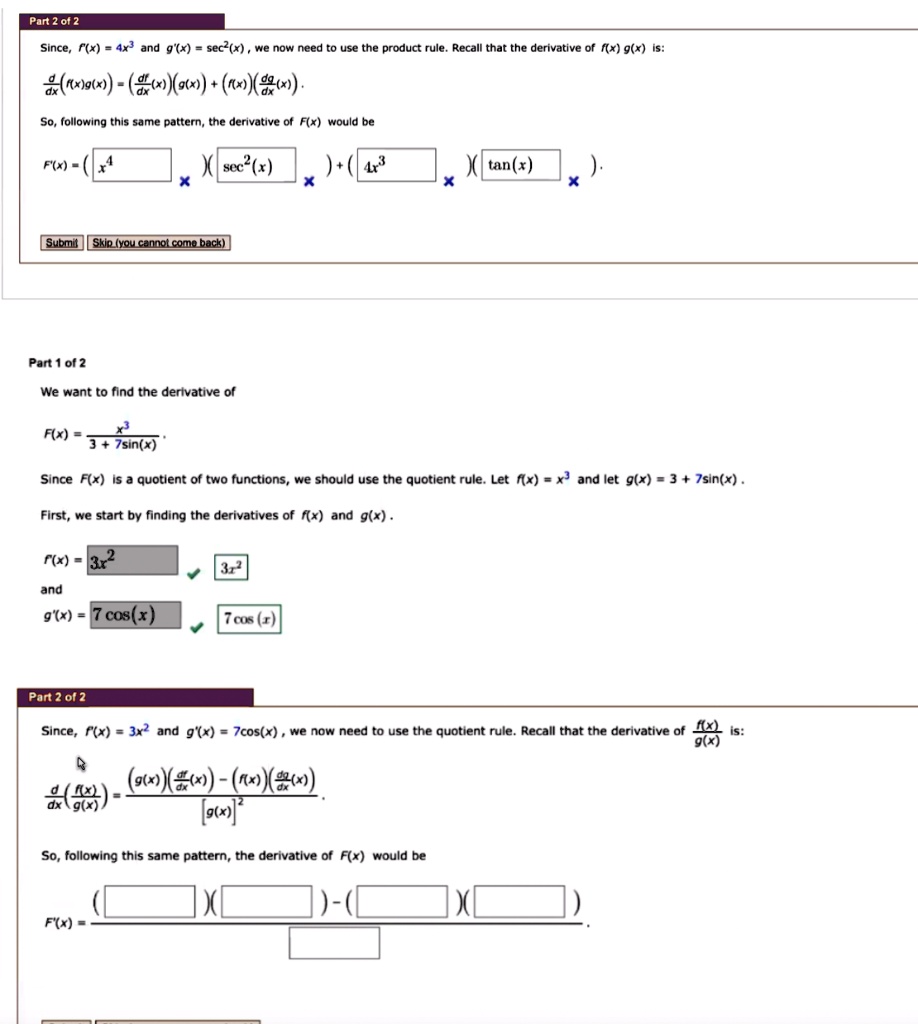
- SOLVED: Part 2 of 2 xxgx = xxgx + (xgx) So, following this same pattern, the derivative of F(x) would be F(x) s Submit Skip (you cannot come back) Part 1 of